Under dagens stuga jobbade vi med att ta fram ett chassi till vår mockup baserat på ritningar och idéer vi hade sen tidigare. Vi kommer att använda borstlösa DC motorer som har många av de egenskaper vi söker. Dessa motorer går att styra och kontralera från en microprocessor, där vi jobbar med en Arduino som kan läsa PWM, dvs en digital signal där man ändrar längden på pulsen för att styra utsignalen. Fördelen är att det finns både komponenter och program som man kan använda och ev modifiera efter sina egna behov.
Notera! Sladdar
Vid montering och håltagning är det viktigt att notera att hålbilden inte är symmetrisk (se bild nedan). 19 resp 16 mm. Konsekvensen kan då bli att sladdarna kommer ut på olika ställen vilket kan vara bra att tänka på om man vill att de ska se likadant ut.
Frågan är ska man hitta likadana motorer eller ska man ha olika hålbilder. Det bästa vore att hitta likadana motorer. För en mockup (one off) går det bra med olika hålbild, men skall man reproducera så måste det vara lika.

Nästa gång ska vi skriva ut hjul på vår 3D skrivare, anpassad till storleken på vårt chassi.
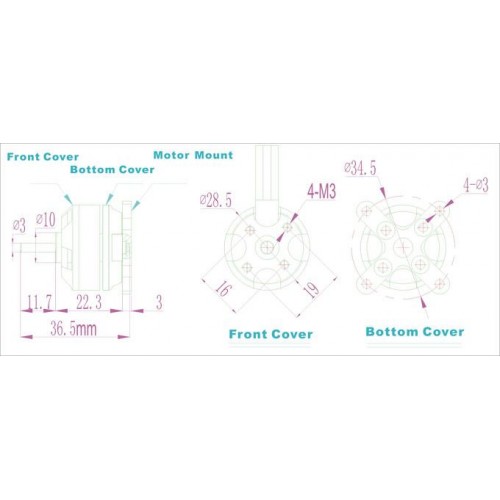
Diameter infästning hjul: 34,5mm
KV1650: KV= varvtal per Volt
Design data:
Spänning: 7.4 V (2S)